Motion based triggers
Use of motion detection to initiate a sequence of actions, such as location capture.
When a tracker is configured to use motion-based triggers to initiate a localization capture, it will use internal sensors (accelerometers) to detect that the asset is being moved (for example, vibrations caused by moving the asset or acceleration caused by starting or stopping of the transport vehicle).
The sensitivity of the can be configured to match the expected use case. For example, waste containers will vibrate for a short time when heavy material is thrown into them, therefore the sensitivity needs to be decreased to reduce false trigger events. On the other hand, in a road transport use-case you want to avoid that every short stop at a red light or in a traffic jam is detected as a stop.
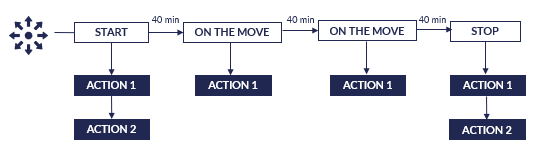
Next to start/stop events, the motion detection system can also generate OTM ("on the move") events. OTM events are triggered at a configurable (in the example above every 40 minutes) periodic interval between starts and stops.
Motion based states and transitions
In following figure the motion based states and transitions are explained:
A location update will be sent on every state transition. Even when it is not possible to do a successful location capture, a message is sent in order not to lose the state information.
The location update message consists of:
- State/trigger: START, STOP, OTM, PERIODIC, SCHEDULED
- Time: the time of the state transition; maximum precision = 1 minutes
- Location: the location on state transition.